En mai 2012, lors d'un voyage en Angleterre avec le groupe des Doigts Toniques, Jill and Jon nous ont fait découvrir le Segway.
Il aura fallut attendre 2015 pour que Titi se mette en tête de se fabriquer le sien.


|
|
CONSTRUCTION d'UN GYROPODE |
En mai 2012, lors d'un voyage en Angleterre avec le groupe des Doigts Toniques, Jill and Jon nous ont fait découvrir le Segway. Il aura fallut attendre 2015 pour que Titi se mette en tête de se fabriquer le sien. |
|
|
|
Le gyropode est ce curieux véhicule à deux roues sur lequel on se retrouve en équilibre de façon un peu magique. Le gyropode est plus connu sous le nom « SEGWAY » qui est en fait une marque commerciale. Le « Segway » est au gyropode ce que le « Frigo » est au réfrigérateur. A noter que l’inventeur du Segway est mort en utilisant son engin. Comme tout véhicule, un gyropode peut devenir dangereux. Il faut donc parfaitement soigner sa construction.
|
Le principe de fonctionnement d’un gyropode est assez simple, dans la mesure où il est assez proche de celui du corps humain. Voilà le process : Si vous restez à la verticale sur le sol sans bouger, vous faites du surplace
|
| Une fois monté sur la plateforme d’un gyropode, les choses se passent exactement de la même façon, mis à part que ce ne sont plus les jambes qui vont bouger, mais cette fois-ci ce sont les 2 moteurs qui vont se mettre à tourner. |
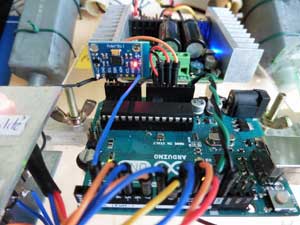
Le cerveau qui commandait les jambes est remplacé alors par un système électronique tout aussi complexe. Le gros du travail est géré par une carte à microcontrôleur de type ARDUINO. Cette carte a été préalablement chargée d’un programme via le port USB d’un ordinateur. |
|
Deux capteurs spéciaux vont collecter des informations :
|
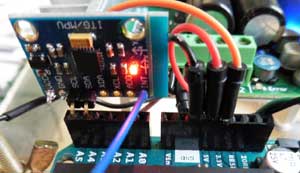 |
L’ensemble de ces informations est traité par le microcontrôleur, qui va à son tour envoyer des impulsions de commande aux deux moteurs pour les faire tourner dans le bon sens et à la bonne vitesse. A noter que la carte ARDUINO à microcontrôleur n’est pas assez puissante pour commander en direct les deux moteurs. Il faudra donc passer par une interface à base de transistors de puissance. |
 |
A son tour, la carte de puissance va commander 2 moteurs (récupération sur un fauteuil de personne handicapée) |
 |
| Le tout est alimenté par 2 batteries en série de 12 V 24 AH chacune. |  |
La construction se divise en 2 domaines bien distincts, à savoir la mécaniuqe et l'électronique embarquée. |
LA MECANIQUE |
Pour ne pas découper de la ferraille pour rien, un prototype virtuel a été dessiné sur Sketchup. Cela permet de concevoir plus facilement la structure support en tenant compte des différents composants mécaniques. Merci à la Sté BREST MEDICAL SERVICE à BREST pour la fourniture gratuite de 2 moteurs et de 2 roues. Quand je dis gratuit, presque ! Cela m'a couté 6 kouign amann....
|
 |
Une fois les croquis validés, un proto de structure a été réalisé en bois. Les moteurs ont été temporairement maintenus en place par des serre-joints. |
 |
 |
Tout semble ok, donc on passe à la vraie structure en carré d'acier 16x16. Merci à mon ami Frank pour la soudure MIG. Cela m'a encore coûté un kouign-amann ! |
 |
 |
Compte tenu du poids total important (estimé à 40 kg) les batteries sont placées sur un rack amovible. On passera alors à deux sous-ensembles de 20 kg chacun plus maniable. Merci à André pour l'usinage des glissières Devinez ce que cela m'a coûté ? |
 |
L'ELECTRONIQUE EMBARQUEE |
Si concevoir un cadre métallique pour maintenir en place 2 moteurs est assez simple, avec l'électronique embarquée, on tape dans un sujet un peu plus ardu. Un banc test a été construit avec en sortie 2 moteurs de lève-vitres. Cela permet de valider le bon fonctionnement de l'ensemble, et éventuellement de détecter des dysfonctionnements, ce qui a été le cas. Une vidéo mettant en avant les différents dysfonctionnements a été faite. |
 |
La vidéo a été envoyée à trois personnes avec qui je suis en contact. 1. Un américain, qui est à l’origine du montage : il est polytechnicien ingénieur informatique. Il bosse pour le gouvernement sur les systèmes de défenses et de communication +systèmes de reconnaissances biométriques + systèmes d’identification ADN + systèmes de communications par satellite. Il donne aussi des cours au MIT de Lincoln… 2. Un canadien qui construit son Segway : il est le n°2 dans une grosse boite de sécurité/alarmes aux Etats Unis. C’est la deuxième plus grande compagnie de sécurité au monde. 3. Un suisse qui construit aussi son Segway. Je ne sais pas grand-chose de lui, mis à part qu’il a fait l’école polytechnique de Lausanne. Tous les 4 cinq, nous échangeons nos expériences respectives, car la machine est assez délicate à mettre au point. Moi, même pas peur avec mon CAP d’électromécanique ! |
 |
En complément des informations recueillies sur le Net, le FABLAB de Quimper est d'une aide précieuse. |
Et maintenant, qu'est-ce qui reste à faire avant de pouvoir chevaucher la bête ? Les dysfonctionnements de la partie électronique semblent avoir disparus (changement du gyroscope). Il ne reste donc plus à monter l'ensemble et faire un câblage en fils volants. Si le tout fonctionne, il faudra donner un coup de peinture à l'ensemble, et aussi faire un câblage aussi propre que définitif. A suivre.... |
![]()
| Pour revenir à la page d'accueil CLIQUEZ ICI |
|---|
![]()